iPL-布局工具
iPL布局工具介绍
1 背景简介
1、布局问题:给定有连接线关系(线网)的单元集合以及布局区域,布局对单元进行放置。一般布局目标是最小化线网总线长/时序/功耗,要求单元满足合法性(在布局区域内、对齐Row/Site、单元相互不重叠等)的规定。
- 线网:单条线网可连接多个Pin点(Pin点位置在单元上或者是在IO处);线网走线方向只有横纵方向。
- 单元:形状通常是矩形。单元类型有宏单元、标准单元(时序单元、逻辑单元)等;单元状态有已固定、待放置等。
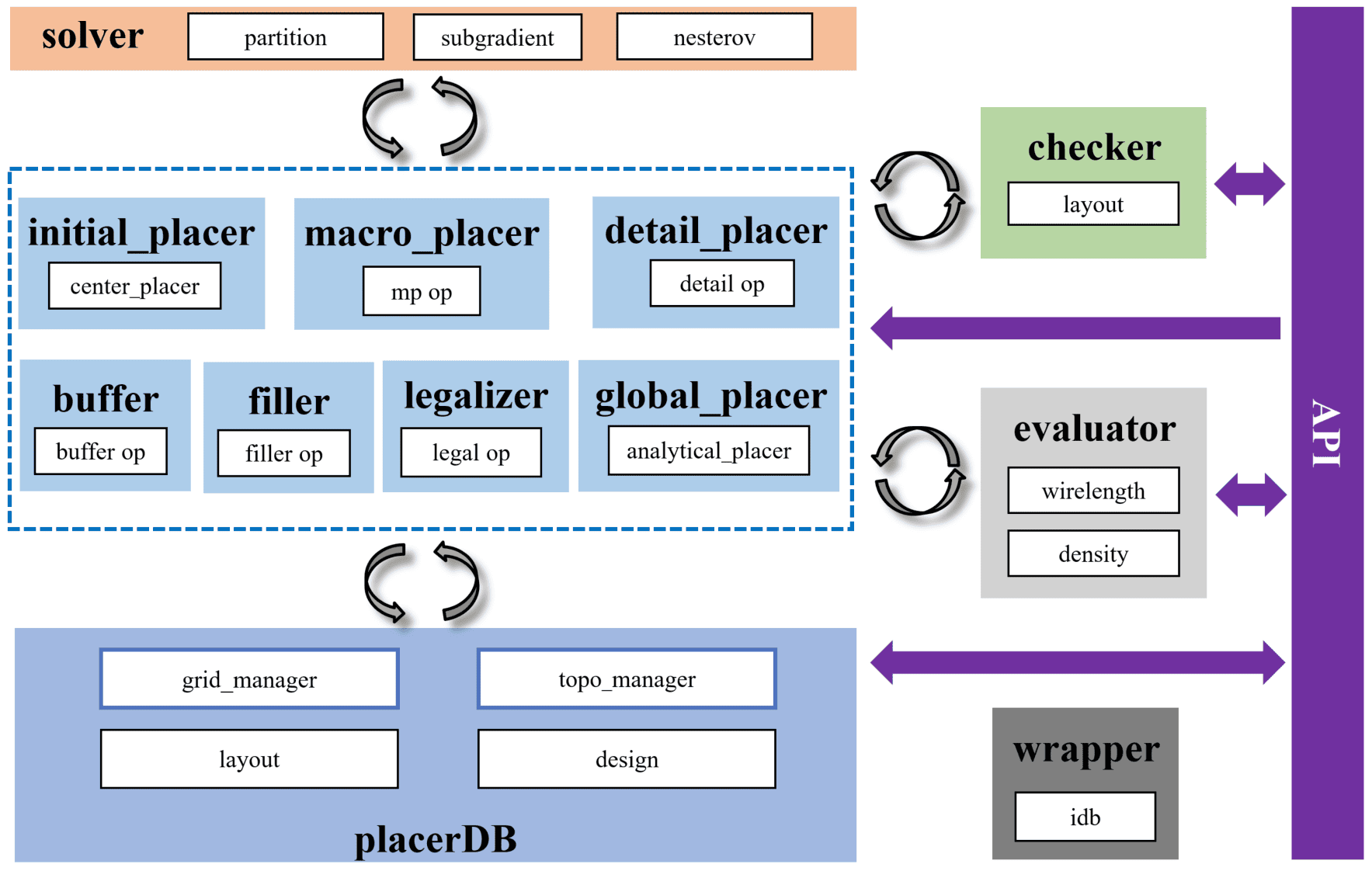
图1 iPL主要流程图
2 主要实现
2.1 功能实现
图5 iPL中实现的主要布局流程,一步到位求解大规模布局问题是NP难的,因此一般划分为三个阶段:全局布局、合法化和详细布局。
- Place std cell into proper location
- satisfy layer poly, well, contact, and metal 1 design rule
- optimize wirelength, timing, congestion
- Place macro cell location automatically
- Incremental placement
- Timing-driven placement (coming soon)
- Congestion-driven placement (coming soon)
图6 布局示意图
2.2 工具API实现
| 方法名 | 子方法 | 类型 | 参数列表 | 返回值 | 方法描述 |
|---|---|---|---|---|---|
| initAPI | * | action | pl_json_path, idb_builder | self | 初始化iPL |
| runFlow | runGP | action | void | self | 运行全局布局 |
| runFlow | runBufferInsertion | action | void | self | 运行Buffer插入 |
| runFlow | runLG | action | void | self | 运行合法化 |
| runFlow | runDP | action | void | self | 运行详细布局 |
| runFlow | writeBackSourceDataBase | action | void | self | 布局数据写回数据源 |
| runIncrLG | * | action | inst_list | self | 运行增量式合法化 |
| updatePlacerDB | * | action | void/inst_list | self | 从数据源更新(指定)数据 |
| obtainAvailable WhiteSpaceList | * | action | row_range,site_range | rectanglelist | 获取指定区域下的可用布局空间(供插入单元使用) |
| checkLegality | * | accessor | void | bool | 检查当前布局结果的合法性 |
| isSTAStarted | * | accessor | void | bool | 检查是否已启动STA |
| isPlacerDBStarted | * | accessor | void | bool | 检查是否已初始化PlacerDB |
| isAbucasLGStarted | * | accessor | void | bool | 检查是否已启动Abucas合法器 |
| reportPLInfo | reportHPWLInfo | accessor | feed | self | 报告HPWL信息 |
| reportPLInfo | reportSTWLInfo | accessor | feed | self | 报告STWL信息 |
| reportPLInfo | reportLongNetInfo | accessor | feed | self | 报告长线网信息 |
| reportPLInfo | reportLayoutInfo | accessor | feed | self | 报告版图违例信息 |
| reportPLInfo | reportPeakBinDensity | accessor | feed | self | 报告Bin区域的峰值密度 |
| reportPLInfo | reportTimingInfo | accessor | feed | self | 报告布局时序信息 |
| reportPLInfo | reportCongestionInfo | accessor | feed | self | 报告布局拥塞信息 |
| obtainTimingInfo | obtainPinEarly(Late)Slack | action | pin_name | value | 获取Pin上的Slack信息 |
| obtainTimingInfo | obtainPinEarly(Late)ArrivalTime | action | pin_name | value | 获取Pin上的ArrivalTime信息 |
| obtainTimingInfo | obtainPinEarly(Late)RequiredTime | action | pin_name | value | 获取Pin上的RequiredTime信息 |
| obtainTimingInfo | obtainWNS/TNS | action | clk_name | value | 获取WNS/TNS信息 |
| obtainTimingInfo | updateTiming | action | void | self | 更新时序评估 |
| obtainCongesionInfo | obtainPinDens | action | void | value | 获取Pin Density信息 |
| obtainCongesionInfo | obtainNetCong | action | rudy_type | value | 获取线网拥塞信息 |
| obtainCongesionInfo | evalGRCong | action | void | value | 更新拥塞评估 |
3 关键技术
3.1 模块设计
图7 iPL模块划分
- PlacerDB模块:封装并维护布局所需的版图数据(layout)和设计数据(Design)
- Operator模块:提取布局数据进行操作,期间调用solver模块进行求解,evaluator模块评估指标,checker模块检查布局结果
- Solver模块:集合一些成熟的求解工具辅助布局
- Checker模块:对当前布局进行违例检查、功能检测、报告输出Evaluator模块:评估当前布局指标
- Wrapper模块:从数据源读取布局数据,布局结果写回数据源
- API:iPL与外部的交互接口
3.2 可布线性方案
- 线长梯度:WA 线长光滑模型
- 密度梯度:e-Density 静电场模型
- 优化算法:Nesterov梯度下降算法
- 拥塞评估方法(由iEDA evaluator提供API):
- LUT-RUDY(Look Up Table-based RUDY)
- Early-GR
- 细粒度单元膨胀:
- 选择峰值拥塞网格的单元进行膨胀
- H/V双方向独立膨胀
- 动态膨胀率调整
- 超线性膨胀指数修正
当全局布局所有单元足够散开(density overflow < 0.2),开始进行可布线性评估和优化
图8 iPL可布线性方案流程
4 输入输出
输入
- 网表优化def文件 ./result/iTO_fix_fanout_result.def
输出
- ./result/iPL_result.def
- ./result/iPL_result.v
评测和报告
- ./result/report/pl_db.rpt
iPL工具的中间报告默认存放在目录:./scripts/design/sky130_gcd/result/pl/
图9 当前的布局结果是否存在违例的检查,详细违例情况在同级目录下文件violation_record.txt
图10 布局优化的线长指标报告,长线网的详细报告在同级目录下文件wirelength_record.txt;单元分布的密度信息,详细报告在同级目录下文件density_record.txt;布局结果的时序信息,详细报告在同级目录下文件timing_record.txt;布局结果的可布线性信息,详细报告在同级目录下文件congestion_record.txt
report/violation_record.txt :布局违例的单元
report/wirelength_record.txt :布局的HPWL线长、STWL线长以及长线线长统计
report/density_record.txt :布局的峰值bin密度
report/timing_record.txt :布局的时序信息(wns、tns),调用Flute进行简易绕线
report/congestion_record.txt:布局的可布线性信息
5 参数说明
参考iEDA_config/pl_default_config.json: ./scripts/design/sky130_gcd/iEDA_config/pl_default_config.json
| 参数名称 | 功能说明 | 参数范围 | 默认值 |
|---|---|---|---|
| is_max_length_opt | 是否开启最大线长优化 | [0,1] | 0 |
| max_length_constraint | 指定最大线长 | [0-1000000] | 1000000 |
| is_timing_aware_mode | 是否开启时序模式 | [0,1] | 0 |
| ignore_net_degree | 忽略超过指定pin个数的线网 | [10-10000] | 100 |
| num_threads | 指定的CPU线程数 | [1-64] | 8 |
| [GP-Wirelength] init_wirelength_coef | 设置初始线长系数 | [0.0-1.0] | 0.25 |
| [GP-Wirelength] reference_hpwl | 调整密度惩罚的参考线长 | [100-1000000] | 446000000 |
| [GP-Wirelength] min_wirelength_force_bar | 控制线长边界 | [-1000-0] | -300 |
| [GP-Density] target_density | 指定的目标密度 | [0.0-1.0] | 0.8 |
| [GP-Density] bin_cnt_x | 指定水平方向上Bin的个数 | [16,32,64,128,256,512,1024] | 512 |
| [GP-Density] bin_cnt_y | 指定垂直方向上Bin的个数 | [16,32,64,128,256,512,1024] | 512 |
| [GP-Nesterov] max_iter | 指定最大的迭代次数 | [50-2000] | 2000 |
| [GP-Nesterov] max_backtrack | 指定最大的回溯次数 | [0-100] | 10 |
| [GP-Nesterov] init_density_penalty | 指定初始状态的密度惩罚 | [0.0-1.0] | 0.00008 |
| [GP-Nesterov] target_overflow | 指定目标的溢出值 | [0.0-1.0] | 0.1 |
| [GP-Nesterov] initial_prev_coordi_update_coef | 初始扰动坐标时的系数 | [10-10000] | 100 |
| [GP-Nesterov] min_precondition | 设置precondition的最小值 | [1-100] | 1 |
| [GP-Nesterov] min_phi_coef | 设置最小的phi参数 | [0.0-1.0] | 0.95 |
| [GP-Nesterov] max_phi_coef | 设置最大的phi参数 | [0.0-1.0] | 1.05 |
| [BUFFER] max_buffer_num | 指定限制最大buffer插入个数 | [0-1000000] | 35000 |
| [BUFFER] buffer_type | 指定可插入的buffer类型名字 | 工艺相关 | 列表[...,...] |
| [LG] max_displacement | 指定单元的最大移动量 | [10000-1000000] | 50000 |
| [LG] global_right_padding | 指定单元间的间距(以Site为单位) | [0,1,2,3,4...] | 1 |
| [DP] max_displacement | 指定单元的最大移动量 | [10000-1000000] | 50000 |
| [DP] global_right_padding | 指定单元间的间距(以Site为单位) | [0,1,2,3,4...] | 1 |
| [Filler] first_iter | 指定第一轮迭代使用的Filler | 工艺相关 | 列表[...,...] |
| [Filler] second_iter | 指定第二轮迭代使用的Filler | 工艺相关 | 列表[...,...] |
| [Filler] min_filler_width | 指定Filler的最小宽度(以Site为单位) | 工艺相关 | 1 |
| [MP] fixed_macro | 指定固定的宏单元 (string macro_name) | 设计相关 | 列表[...,...] |
| [MP] fixed_macro_coordinate | 指定固定宏单元的位置坐标(int location_x, int location_y) | 设计相关 | 列表[...,...] |
| [MP] blockage | 指定宏单元阻塞矩形区域,宏单元应该避免摆放在该区域(int left_bottom_x, int left_bottom_y, int right_top_x, int right_top_y) | 设计相关 | 列表[...,...] |
| [MP] guidance_macro | 指定指导摆放宏单元,每个宏单元可以设置期望摆放的区域 (string macro_name) | 设计相关 | 列表[...,...] |
| [MP] guidance | 指定对应宏单元的指导摆放区域(int left_bottom_x, int left_bottom_y, int right_top_x, int right_top_y) | 设计相关 | 列表[...,...] |
| [MP] solution_type | 指定解的表示方式 | ["BStarTree","SequencePair"] | "BStarTree" |
| [MP] perturb_per_step | 指定模拟退火每步扰动次数 | [10-1000] | 100 |
| [MP] cool_rate | 指定模拟退火温度冷却率 | [0.0-1.0] | 0.92 |
| [MP] parts | 指定标准单元划分数(int) | [10-100] | 66 |
| [MP] ufactor | 指定标准单元划分不平衡值 (int) | [10-1000] | 100 |
| [MP] new_macro_density | 指定虚拟宏单元密度 | [0.0-1.0] | 0.6 |
| [MP] halo_x | 指定宏单元的halo(横向) | [0-1000000] | 0 |
| [MP] halo_y | 指定宏单元的halo(纵向) | [0-1000000] | 0 |
| [MP] output_path | 指定输出文件路径 | "./result/pl" |
支持功能
- 支持标准单元的全局布局、合法化、详细布局;
- 支持对布局结果进行违例检查、报告布局阶段线长、密度、时序、拥塞
- 支持在布局阶段插入buffer进行长线优化;
- 支持增量式合法化;
- 时序优化与拥塞优化进一步完善中;
iPL使用示例
通过tcl启动
参考iPL_script/run_iPL.tcl: <ieda_path>/scripts/design/sky130_gcd/script/iPL_script/run_iPL.tcl
iPL支持使用的tcl命令
run_placer -conifg <config_path> // 完整运行整个iPL
run_filler -conifg <config_path> // 对布局的空白区域进行单元填充
run_incremental_flow -conifg <config_path> // 对改变单元位置的结果进行重新合法化
run_incremental_lg // 进行增量式合法化,需保证iPL已运行
placer_check_legality // 检查当前布局的合法性
placer_report // 对当前布局的状态进行report
init_pl -conifg <config_path> // 对布局器进行初始化
destroy_pl // 销毁布局器
placer_run_mp // 进行宏单元布局
placer_run_gp // 进行标准单元全局布局
placer_run_lg // 进行标准单元合法化
placer_run_dp // 进行标准单元详细布局
Config配置文件
参考iEDA_config/pl_default_config.json: <ieda_path>/scripts/design/sky130_gcd/iEDA_config/pl_default_config.json
| JSON参数 | 功能说明 | 参数范围 | 默认值 |
|---|---|---|---|
| is_max_length_opt | 是否开启最大线长优化 | [0,1] | 0 |
| max_length_constraint | 指定最大线长 | [0-1000000] | 1000000 |
| is_timing_effort | 是否开启时序优化模式 | [0,1] | 0 |
| is_congestion_effort | 是否开启可布线性优化模式 | ||
| ignore_net_degree | 忽略超过指定pin个数的线网 | [10-10000] | 100 |
| num_threads | 指定的CPU线程数 | [1-64] | 8 |
| [GP-Wirelength] init_wirelength_coef | 设置初始线长系数 | [0.0-1.0] | 0.25 |
| [GP-Wirelength] reference_hpwl | 调整密度惩罚的参考线长 | [100-1000000] | 446000000 |
| [GP-Wirelength] min_wirelength_force_bar | 控制线长边界 | [-1000-0] | -300 |
| [GP-Density] target_density | 指定的目标密度 | [0.0-1.0] | 0.8 |
| [GP-Density] bin_cnt_x | 指定水平方向上Bin的个数 | [16,32,64,128,256,512,1024] | 512 |
| [GP-Density] bin_cnt_y | 指定垂直方向上Bin的个数 | [16,32,64,128,256,512,1024] | 512 |
| [GP-Nesterov] max_iter | 指定最大的迭代次数 | [50-2000] | 2000 |
| [GP-Nesterov] max_backtrack | 指定最大的回溯次数 | [0-100] | 10 |
| [GP-Nesterov] init_density_penalty | 指定初始状态的密度惩罚 | [0.0-1.0] | 0.00008 |
| [GP-Nesterov] target_overflow | 指定目标的溢出值 | [0.0-1.0] | 0.1 |
| [GP-Nesterov] initial_prev_coordi_update_coef | 初始扰动坐标时的系数 | [10-10000] | 100 |
| [GP-Nesterov] min_precondition | 设置precondition的最小值 | [1-100] | 1 |
| [GP-Nesterov] min_phi_coef | 设置最小的phi参数 | [0.0-1.0] | 0.95 |
| [GP-Nesterov] max_phi_coef | 设置最大的phi参数 | [0.0-1.0] | 1.05 |
| [BUFFER] max_buffer_num | 指定限制最大buffer插入个数 | [0-1000000] | 35000 |
| [BUFFER] buffer_type | 指定可插入的buffer类型名字 | 工艺相关 | 列表[...,...] |
| [LG] max_displacement | 指定单元的最大移动量 | [10000-1000000] | 50000 |
| [LG] global_right_padding | 指定单元间的间距(以Site为单位) | [0,1,2,3,4...] | 1 |
| [DP] max_displacement | 指定单元的最大移动量 | [10000-1000000] | 50000 |
| [DP] global_right_padding | 指定单元间的间距(以Site为单位) | [0,1,2,3,4...] | 1 |
| [Filler] first_iter | 指定第一轮迭代使用的Filler | 工艺相关 | 列表[...,...] |
| [Filler] second_iter | 指定第二轮迭代使用的Filler | 工艺相关 | 列表[...,...] |
| [Filler] min_filler_width | 指定Filler的最小宽度(以Site为单位) | 工艺相关 | 1 |
| [MP] fixed_macro | 指定固定的宏单元 (string macro_name) | 设计相关 | 列表[...,...] |
| [MP] fixed_macro_coordinate | 指定固定宏单元的位置坐标(int location_x, int location_y) | 设计相关 | 列表[...,...] |
| [MP] blockage | 指定宏单元阻塞矩形区域,宏单元应该避免摆放在该区域(int left_bottom_x, int left_bottom_y, int right_top_x, int right_top_y) | 设计相关 | 列表[...,...] |
| [MP] guidance_macro | 指定指导摆放宏单元,每个宏单元可以设置期望摆放的区域 (string macro_name) | 设计相关 | 列表[...,...] |
| [MP] guidance | 指定对应宏单元的指导摆放区域(int left_bottom_x, int left_bottom_y, int right_top_x, int right_top_y) | 设计相关 | 列表[...,...] |
| [MP] solution_type | 指定解的表示方式 | ["BStarTree","SequencePair"] | "BStarTree" |
| [MP] perturb_per_step | 指定模拟退火每步扰动次数 | [10-1000] | 100 |
| [MP] cool_rate | 指定模拟退火温度冷却率 | [0.0-1.0] | 0.92 |
| [MP] parts | 指定标准单元划分数(int) | [10-100] | 66 |
| [MP] ufactor | 指定标准单元划分不平衡值 (int) | [10-1000] | 100 |
| [MP] new_macro_density | 指定虚拟宏单元密度 | [0.0-1.0] | 0.6 |
| [MP] halo_x | 指定宏单元的halo(横向) | [0-1000000] | 0 |
| [MP] halo_y | 指定宏单元的halo(纵向) | [0-1000000] | 0 |
运行的Log、Report
默认存放在目录:<ieda_path>/scripts/design/sky130_gcd/result/pl/
- report/violation_record.txt :布局违例的单元
- report/wirelength_record.txt :布局的HPWL线长、STWL线长以及长线线长统计
- report/density_record.txt :布局的峰值bin密度
- report/timing_record.txt :布局的时序信息(wns、tns),调用Flute进行简易绕线